

北航新闻网9月21日电(通讯员 文丽芳)䲟鱼可以在游动中通过头部的吸盘完成对鲨鱼、海豚、海龟、潜水员等不同海洋生物/非生物表面的快速吸附。生物学家形象地将该行为称为“搭顺风车”(hitchhiking),从而减少䲟鱼自身的能耗。其头部的吸盘是由背鳍进化而成,被生物学家称作“脊椎动物解剖学上最奇妙的结构之一”。
9月21日,北京航空航天大学文力副教授牵头的国际合作团队在顶级期刊《Science Robotics》以长文(Research Article)发表了最新的研究成果“A biorobotic adhesive disc for underwater hitchhiking inspired bythe remora suckerfish”,揭示了䲟鱼软体吸盘的仿生学原理并首次制作了仿生机器人样机。该论文被选为《Science Robotics》2017年9月刊的封面论文。北京航空航天大学为该研究的第一单位、第一通讯单位。这也是我国发表在《Science》机器人子刊上的首篇论文。《Science》官方网站以多媒体形式详细介绍了该项研究。
《Science Robotics》论文封面图片
该研究涉及到包括生物力学、材料、化学、机器人等多个研究领域交叉。文力为该项目负责人,论文的第一通讯作者。北航机械学院2015级研究生王越平、博士后杨兴帮、哈佛大学Yufeng Chen博士为该文的共同第一作者。我校材料学院管娟副教授,化学学院的刘欢教授为该研究提供了材料动态性能测量,表面微观结构等方面的数据,哈佛大学Lauder实验室提供了䲟鱼吸盘的断层扫描数据,哈佛大学Wood实验室制作了微激光加工碳纤维小刺。2014级研究生龚哲元,2015级研究生刘泽民负责水下机器人的制作与演示。王田苗教授参与项目论证与讨论。
该项目共历时4年。课题组先后通过环境扫描电镜、microCT、高速相机同步运动追踪等生物测量手段,获得䲟鱼吸盘的宏观与微尺度结构与运动模式。主要发现如下:䲟鱼头部吸盘主要由三个部分组成:1).吸盘外周的唇圈,该部分主要由柔性的肌原纤维组成,主要产生负压(如图2)。2).吸盘内部的鳍片结构,该部分主要由硬质的结构组成,外表包裹一层厚度约为500微米的软组织。吸盘内部存在15~28排不等鳍片,这些鳍片可由肌肉驱动产生在垂直方向的微动。3).吸盘鳍片上的锥状小刺结构,底部直径为200多微米,顶端部为1-5微米。
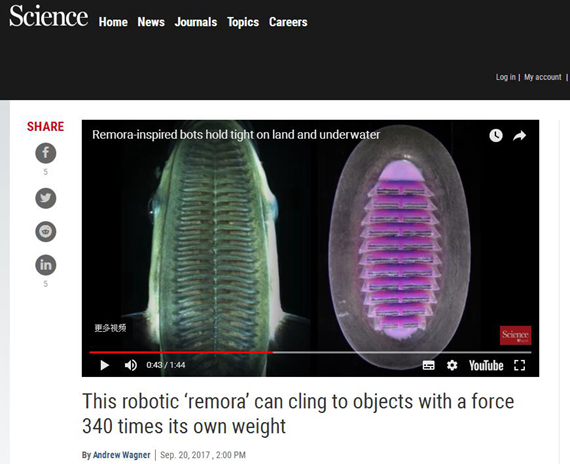
仿生软体䲟鱼吸盘与生物吸盘对比(Science/AAAS MultimediaNews截图)
研究团队进一步利用复合多材料3D打印技术实现一体化打印成形,吸盘样机材料刚度跨越三个数量级(杨氏模量1兆帕~3000兆帕)。同时,利用高精度激光加工技术制作了碳纤维硬质小刺(底部直径270微米)嵌入到复合材料的样机鳍片中,如图2。同时,课题组用轻量化、防水的软体纤维增强的直线驱动器驱动,实现了䲟鱼吸盘内部鳍片的微动。仿生样机在光滑表面能够产生340倍,在粗糙表面上产生约100倍自重的吸附力。同时,课题组也首次揭示,吸盘内部鳍片的主动抬起、鳍片上硬质小刺以及软组织的协同作用使䲟鱼能够吸附在多尺度的粗糙表面。
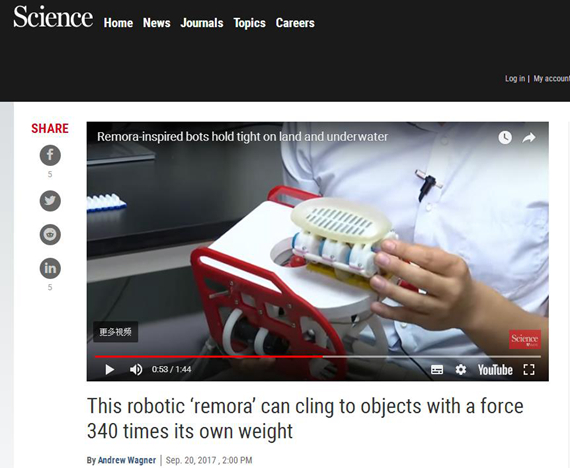
集成䲟鱼仿生软体吸盘的水下机器人(Science/AAASMultimedia News截图)
通过将仿生样机集成到水下机器人上,实现了类似䲟鱼的游动-吸附-脱离。这项研究工作不但从生物力学角度揭示䲟鱼的吸附机制,同时为未来的低功耗水下仿生软体机器人、水下吸附装置提供了新的思路。
该项目得到了国家自然科学基金项目“䲟鱼仿生游动吸附机理与实验研究”(项目号:61403012),重点项目“基于软体机器人的水下目标识别与抓取”(项目号:61633004),北航青年拔尖人才项目的支持。
论文链接:
http://robotics.sciencemag.org/content/2/10/eaan8072
Science/AAAS multimedia报道链接: